[DIY] 헬박사 Robot이야기[1] : 자세가 불량하다.
- Link
- http://m.irobotnews.com/news/articleView.html?idxno=450450
- https://ko.aliexpress.com/item/1005006789499412.html47
기계로 음직이는 로봇이 우리 생활속에 일하는 robot으로
들어온 것은 몇 년 안되지만
공장에 들어온 것은 1980년대에 들어 오기 시작했답니다.
그 바람을 타고 KAIST에서 KAISEM이라는 로봇도 만들고 (링크 1)
( 헬박사가 이거 실제 동작 시키느라 체중이 빠졌다는 소문이 있습니다. )
그게 만들어 놓고 제대로 동작을 안 하니 교육용 로봇 Rhino XR1을
수 대 구입해서 프로그램 연습하였답니다.

만화에 나오는 헬박사 로봇과는 엄청 다르죠?
아무튼 이런 로봇이 25MHz의 16 비트마이크로 프로세서인
MC68010이란 MCU에서 [Inverse Kinematics]방정식을
풀면서 동작 하였답니다.
당시 개념에서는 뛰어난 '협업하는 로봇'이란 제목이였지만 지금 생각하면 쑥스럽기만 하네요.
어찌 되었던
로봇의 어정쩡하게 서 있는 형태의 로봇은 일을 시킬 수 없어
[차렸자세]부터 가르치는 일을 하였답니다.
이 [차렸자세]는 로봇의 기본자세이기도 합니다.
보통 로봇이 서 있는 자세는 차려자세[Ready]와 준비자세[Zero]로
운동선수의 기본자세와 같이 생각하면 됩니다.
일단 차려 자세는 자세 (0,-90, 90, 0,0,0)이라고 합니다.
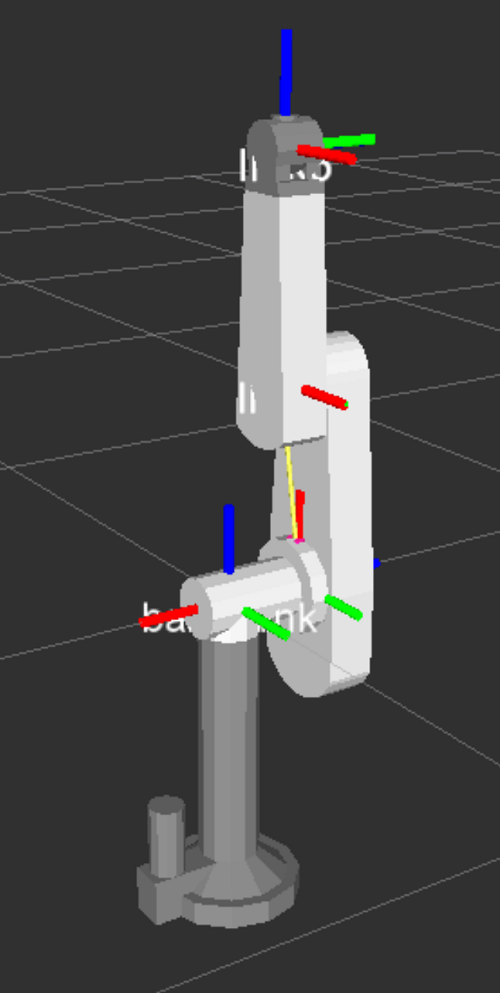
와 같이 똑바로 서 있는 자세입니다.
이 자세는 로봇 회사에서는 추천하지 않는데 아마 넘어질까봐 그런 것 같습니다.
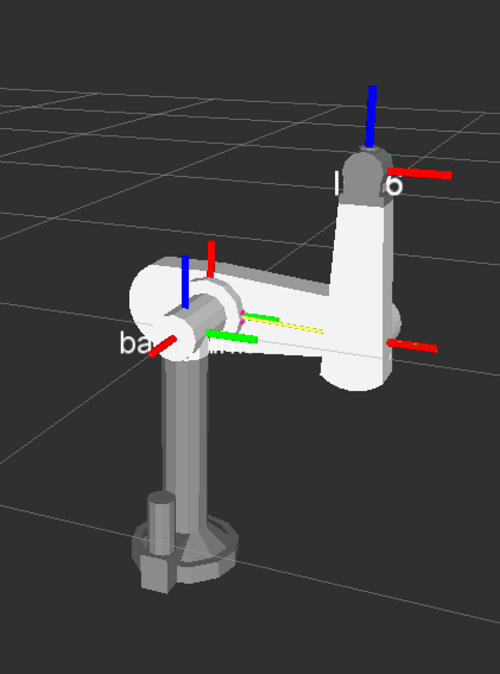
준비자세(Zero Position)는 로봇의 원점 자세라고 생각하시면 됩니다.
즉 일하기 직전의 가세입니다.
즉 자세 (0,0,0,0,0,0) 이라고 합니다.
이 모형은 산업용 로봇의 시작인 1980년대에 KIST에
도입되어 있던 PUMA560 로봇입니다.
당시에 한국 경제 사정으로는 엄청 고가의 로봇이라
'부들부들 떨면서 동작 시켰다' 라고생각 하시면 됩니다.
어쨌던 자세 (0,0,0,0,0,0)과 자세 (0,-90,90,0,0,0)만
알아도 유식한 것이니
그런데 여기 이 글을 읽고 계신분은 왜 자세 (0,-90, 90,...)
이라고 이야기 하는지 아실 겁니다.
일단 요기 까지 로봇 자세에 대하여 이야기 합시다.
우리가 사용할 로봇은 외국제 로봇입니다.
엄청난 고가의 로봇입니다. [링크 2 참조]
-- 짜잔 ---
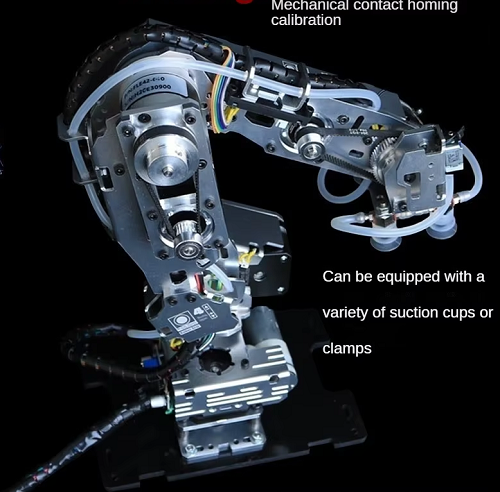
이 로봇 암입니다.
이 로봇 구입과 조립이야기는 다음에..
.


메이커 DIY
최근 게시물





Tag Clouds