[DIY] 헬박사 Robot이야기[3] : Robot 전문가 한걸음 - Robot kinematics
Robot이란 단어가 쓰이는 곳을 찾아보면 의외의 장소에서 쓰이고 있는 것을 볼 수있습니다.
공장에서 용접하는 로봇이나, 요즈음은 카페에서 커피 말아주는 로봇, 가정용 바닥청소로봇, 음식점의 음식배달 로봇,등 기계적으로 음지이는 로봇부터 주식 시장에서 자동으로 주식 매매하는 소프트웨어로 실체가 보이지 않는 로봇도 있답니다. (링크 참조)
그러한 로봇이 많고, 로봇의 3원칙인 하는 규정도 있어서
요즈음 이 분야의 인문학도 발달하고 있답니다.
그러한 일들은 그쪽 분야 전문가에게 맞기고
우리는 로봇을 만들고
로봇을 활용하고
로봇에 일을 시키고자 합니다.
우리는 이쪽으로 전문가가 되기로 합시다.
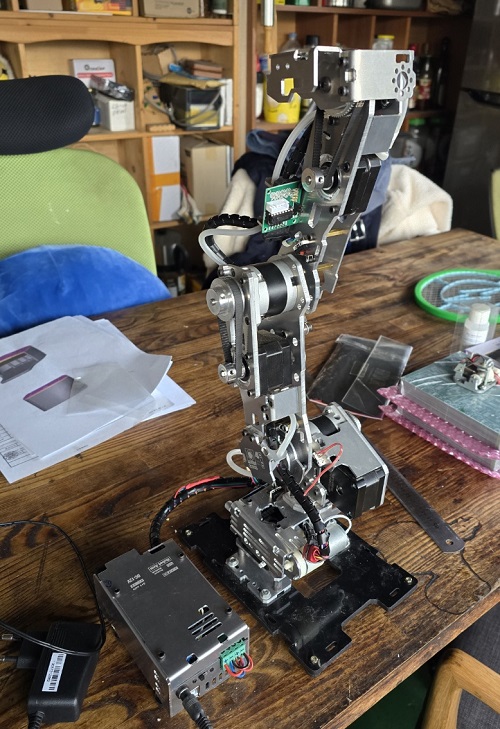
우리는 지난번 보여드린 로봇팔을 이용한 [장난감]을 만들 예정입니다.
로봇중에 가장 멋있어 보이지만 가장 쓸모 없는로봇이 [가정용] 로봇팔 같아요.
일단 험난한 과정을 거쳐 조립을 하고 시험 동작을 했습니다.[박수!!작짝짝]
구입부터 조립 과정은 다음 번 이야기에서 해 드리겠습니다.
이 로봇은 전혀 쓸 데가 없어요.
집에서
청소도 - 못하고,
숙제도 - 못하고,
- 못하고,
- 못하고,
- 안하고...
그래서 그냥 단순한 일을 시키기로 하였답니다.
모래판위에 시간을 쓰는 일을 시킬 예정입니다.
이 모래판 위에 시간을 쓰는 시계는
청계천에서 몇 번 workshop으로
전용 기구의 모래 시계 워크숍을 진행한 적이 있습니다
이번에는 이 로봇을 활용한 모래시계 작업을 하고자 합니다.
모래 시계에 관한 사항은 링크를 참조하시면 그때 진행했던 소프트웨어가 있습니다.
https://www.hellmaker.kr/post/251
로봇에게 일을 시키는 일은 실제로 엄청 복잡합니다.
그래서 각종 소프트웨어나 로봇교육(Teach)하는 장비도 있습니다만.. 아직도
인공지능이 나왔고 관련 소프트웨어에 엄청 노력, 공부, 학습, 연구를 만은 휴만종족들이 하고 있답니다.
언젠가는 휴먼종족이 하는 말 귀를 알아 듯는 휴머노이들이나 안드로이드가 탄생할 것으로 예상하고 있답니다.
우리는 그 태초의 세대에 살고 있으니 그에 걸맞는 지식을 습득하기로 합니다.
오늘 학습할 단어는 정방향 기구학(forward kinematics)라는 단어입니다.
저는 원래 전기전자과라서 이 쪽으로 전혀 배경이 없다가 1983년에 석사과정에 로봇을 공부하려보니 책의 1장에 이 kinematics matrix라는 게 나오더군요.
다행이 선형 대수학으로 matrix, vector, tensor등을 배우고 matrab이란 [수학]소프트웨어도 배워 놓은 상태라서 이 내용을 학습도하고, 계산도 해 보고 이해 하였습니다. 지금 보시고 모른다고 포기하시며 좌절 금지입니다.
제가 하는 방법 따라가시면 그거 몰라도 다 해결 된답니다.
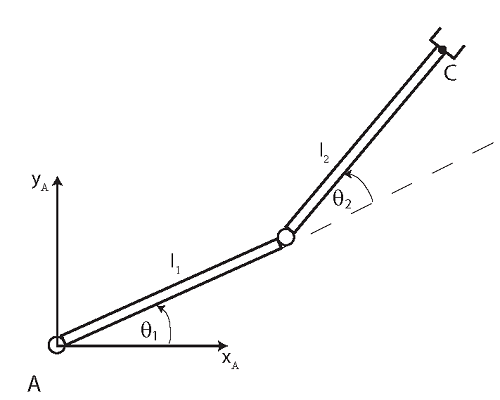
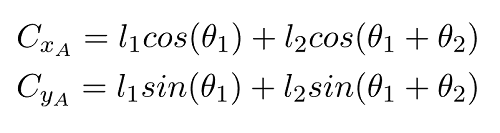
그림 처럼 2개의 로봇팔 관절의 각도가 주어지면
최종점(로봇 팔의 끝점: 보통 end Effect라고 합니다) 의 위치를 구할 수 있습니다.
이 최종점의 위치를 로봇팔 각도에서 X, Y, Z 좌표를 알 수 있습니다.
이것은 고등학교 수학에서 다 룰 수 있을 정도로 간단합니다.
이것을 정방향 기구학(forward kinematics)라고합니다
반대로 X, Y, Z 좌표에서 각 암의 각도를 구하는 일은 역방향 기구학(inverse kinematics)이라 합니다.
그런데 이것은 어렵습니다. 일단 그림만 대충봐도 만족할 만한 해가 2개가 됩니다. (왜 그럴까요?)
이것이 3차원이 되면 해는 무한개가 됩니다.(이를 어쩐다 ㅠㅠ)
그래서 제한조건을 설정해서 .. 원하는 각도를 찾아서 로봇의 관절모터에 원하는 각도로 돌리면 됩니다.
오늘은 여기까지..
다음은 실제로 로봇을 가지고 실험하는 일을 하겠습니다.


메이커 DIY
최근 게시물





Tag Clouds