[DIY] 헬박사 Robot이야기[4] : Robot 전문가 한걸음 - Robot 조립하기
- Link
- https://youtu.be/wwuHNvVUx_857
로봇 암 구매하고 조립하기.
로봇암이 우리 작업실에 2개가 있습니다.
공장에서 폐기 처분하는것 말만 듣고 구입했습니다.
그 공장에 새 로봇을 구매해서 폐기 처분한다고 했는데
제가 갔을때 이미 다 들어내고 한쪽에 서 있었습니다.
아마 구입할때 그 가격만큼 일을 다한 것 같은데..
아마 원인은 그 로봇을 가지고 다루던 엔지니어가 퇴사하면서
새로운 일을 학습 시키지 못한 것 같은 눈치였습니다.
일단 학습하는 교재로 구입하였으니 연결된 거 모두다
쏴~~악 쓸어 왔습니다.

그런데 막상 연구하려니 엄두가 안 나서 시작 못하고 있습니다.
로봇을 공부해야 하는데..
로봇 사양은 다음과 같습니다.
제조사: 슈타우블리(Staubli)
모델명: RX90B
자체 무게: 111kg
pay Load: 6.0Kg
구입 가격 : 엄청 비쌈
주 용도 : 분배, 원격 TCP, 용접.
기타 : 최대 암 도달거리 900mm
그런데 그것 들여보니, 아무래도 간단하게 책상 위에
올려놓고 볼 수 있는 로봇이 구입해 공부해 보고 싶은 생각이 들었습니다.
그 목적에 맞는 조그마한 Kuka robot이 가지고 싶어졌습니다.
어느 날 지인 회사에 갔더니 요리하는 로봇 시스템을 만들고 있었습니다.
그 요리하는 소형 로봇이 쿠카 로봇이고
로봇이 음직이는 동작이 아주 부드럽고 ... 등등..
정말 탐나는 로봇이었습니다.
그런데 가격이 중고로 800만원 정도 하였습니다.
구입자가 구입하였다고 하는데
아직까지 저에게는 버거운 느낌입니다.
그래서 신품 외제로 조금 있어 보이는 놈으로 외국제 하나 구입했습니다.
조립은 김도혁님 양재동 메이커가 맡아서 하기로 하였습니다..
그런데 조리 도중에 문제가 생겼습니다.
조립에 일가견이 있는 김도혁님이 조립하는 과정에 없는 키트에 있어야 할
부품이 없는것입니다. 조립중 포기로 한달 정도 지난 후 우리 포천 작업실로 와
대책마련을 하였습니다.
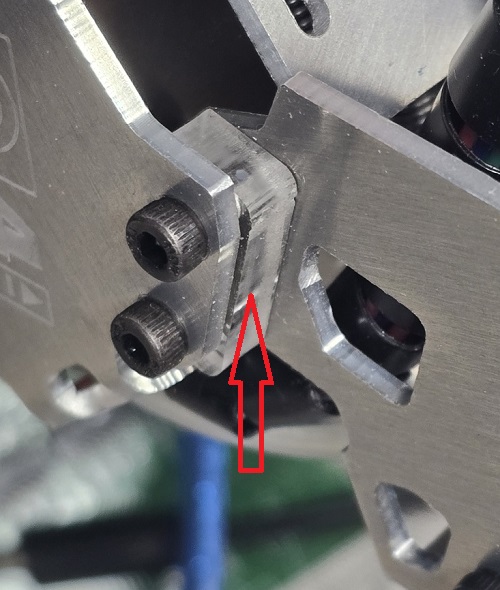
그리하여 없는 부품 만들기--
레이저CNC로 부품을 만들고 하여 조립을 다시 하기 시작했습니다.
(1) 키트에 빠진 부품들을 아크릴로 잘라만들어 조립하고
(2) 원래 설계에서 잘 안 맞는 부분은 과감하게 변경하여
조립을 어렵사리 끝냈습니다.
그래서 모터가 돌아가는 정도까지 만들었습니다.
만들어서 스텝모터를 구동하는 수준까지 만들었습니다.
여기 까지가 로봇암 조립하는 단계입니다.
일단 로봇을 구동하는 영상을 보시고 다음에 이
시험 프로그램에 대하여 설명하도록 하겠습니다.


메이커 DIY
최근 게시물





Tag Clouds