[일반] 서보 모터 관련 여러가지 문제
약 2년 정도 작은 로봇을 제작 하면서 나름 서보 모터 관련하여 몇가지 경험을 간단히 정리 봅니다.
저렴한 서보 모터를 사용한 로봇 프로젝트에서 조립 후 정밀한 동작을 위해서는 자세 조정이 필요한데 서보 모터의 기구 적인 부분 또는 조립시 유격이 발생되어 각각의 제작 시 미세 조정을 대부분 해줘야 한다.
서보 모터 360도 무한 회전
가끔 조립 후 180도 회전 인데 무한 회전 하는 경우가 종종 목격 되었다, 이런 경우 서보 모터의 불량이 의심되기도 하나 추가 적인 점검이 필요하 경우도 있다.
1. 혹 정격 범위 (180도) 이상 동작 하도록 코드 오류 또는 아두이노 같은 경우 메모리 사용이 많은 경우 메모리 침범으로 오동작이 발생되기도 한다.

2. MCU의 전원만으로 동작하는 경우 같이 서보 모터의 사용 전류 부족에 위해 이상 동작이 확인 되는 경우가 종종 목격 하였다, 이경우 H/W 전원 분리등 회로적인 부분을 보강이 필요하다.
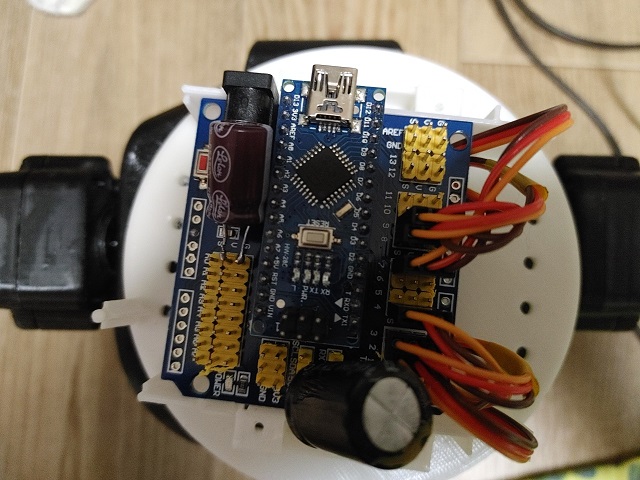
서보 모터가 한꺼번에 움직 경우 순간 적압 하강으로 MCU가 재시작 될수 있어서 콘덴서를 5V 전원 연결하여 안정성 확보
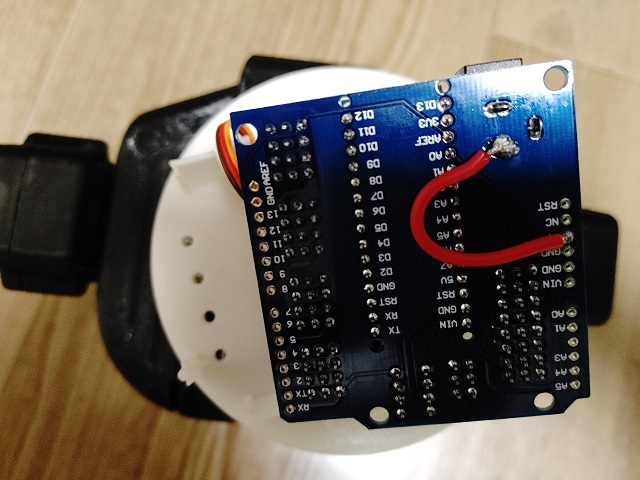
아두이노 확장 보드 같은 경우 5V 레귤레이터 거처 전원이 입력되어 서보 모터에 전달 되는 전류의 부족 문제가 발생되어 5V외부 전원을 직접 보드에 입력 하도록 회로 수정
서모 모터 떨림 현상
구글을 찾아보면 서버 모터 자체가 1~2도 정도 미세한 떨림이 존재 한다는 글들이 있다, 너무 저렴한 서보 모터 또는 사용 전류 부족 등등의 원인으로 추측 되며, 추가 정보 확인 되면 공유 하도록 하겠습니다.

메이커 스토리
최근 게시물





Tag Clouds